日志
杠杆原理之牛顿第三定律
||
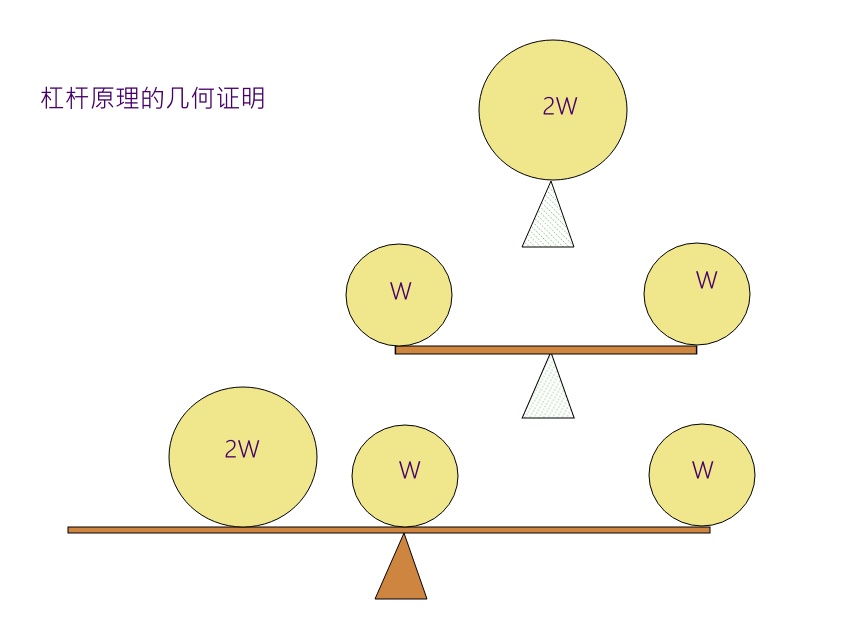
阿基米德发现杠杆原理之后,曾经发出一句名言:给我一个支点,我能撬动整个地球。那么,阿基米德是怎么证明杠杆原理的呢?他当然不知道牛顿力学,也没有什么力矩的概念。其证明是根据“几何的原理”。大致思路如下,两个重量相等的物体用一个杆子连起来,那么根据对称性,如果支点设在杆子中间,两个重物处于平衡,支点承受的重力是两个重物重量之和。这样进行替换之后,如果一边是一半重量,但臂长是另一端的两倍,应该也能平衡。
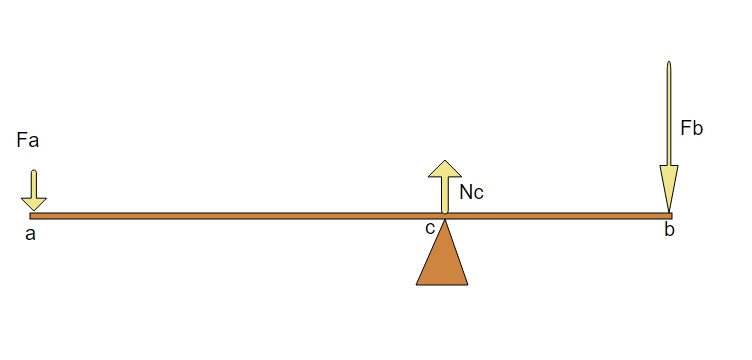
这个证明很巧妙,但似乎不是从静力学的第一原理出发。静力学的第一原理应该是,一个点上总的合力为零,则该点处于静平衡。如下图,杠杆 ab, 支点为 c, a 点受外力 Fa,b点受垂直外力 Fb, c 点支撑力 Nc 。杠杆原理是 ac 的长度乘以 Fa, 等于 bc 的长度乘以 Fb。但从力的平衡,我们似乎 只能得出 Nc = Fa+Fb .
亚里士多德曾用虚位移的方法证明杠杆原理。他说假设杠杆转动一个角度,那么 a 点的速度 Va与 b 点的速度 Vb的比为 ac 与 bc 的长度比,而根据他的力学,作用等于力乘以速度。平衡情况下,两个作用相等,Fa * Va = Fb * Vb,得出 Fa * ac = Fb * bc 。当今的力学教科书证明杠杆原理与亚里士多德这个证明几乎雷同,但是基于所谓虚功原理。我不得不问,为什么证明杠杆的平衡要用到这些似乎是动力学的概念。按理说,既然杠杆处于平衡状态,只需要利用合力为零的原理即可。
如果杠杆是1维的,我们可以看出上图其实是不可能的。因为,ac 受到一个静力矩,没有任何其他力矩可以抵消这个力矩。所以,要从静力平衡证明杠杆原理,不能假定杠杆为1维,而必须把杠杆看成二维(或三维)空间相互作用、维持相对位置的点阵,有了这个正确思路,就可以着手了。我们列出杠杆上 i 点的力静力平衡方程如下:
[ix]\delta_{a,i} F_a + \delta_{c,i} N_c + \delta_{b,i} F_b + \sum_j F_{j, i} =0[/ix]
上面这个方程里,F,N为向量,F_{j,i} 是j 点对i 的力,它仅仅是说,杠杆上 i 点的力的总和为0 。
有了上面的力平衡方程与牛顿第三定律,要证明杠杆原理,应该只是一个数学问题了。为此,我们在 i 点静力平衡方程两边叉乘改点的位置向量 r_i ,我们有
[ix]r_i \times \left[\delta_{a,i} F_a + \delta_{c,i} N_c + \delta_{b,i} F_b + \sum_j F_{j, i}\right]=0[/ix]
然后,我们对 i 求和:
[ix]\sum_{i} r_i \times \left[\delta_{a,i} F_a + \delta_{c,i} N_c + \delta_{b,i} F_b + \sum_j F_{j, i}\right]=0[/ix]
注意,Fa, Fb, Nc 项可以被提出来:
[ix]r_a \times F_a + r_b\times F_b + r_c \times N_c + \sum_{i} r_i \times \sum_j F_{j, i}=0[/ix]
但是:
[ix]\sum_{i} r_i \times \sum_j F_{j, i}= \frac{1}{2} \left[ \sum_{i} r_i \times \sum_j F_{j, i} + \sum_{j} r_j \times \sum_i F_{i, j} \right] \\
=\frac{1}{2} \sum_{i,j} (r_i \times F_{j,i} + r_j \times F_{i,j}) = \frac{1}{2} \sum_{i,j} (r_i-r_j)\times F_{j,i}=0[/ix]
上面用到了牛顿第三定律:[ix]F_{j,i} = - F_{i,j}[/ix]
因此,
[ix]r_a \times F_a + r_b\times F_b + r_c \times N_c =0[/ix]
取 c 点为原点, r_c =0,我们就得到了杠杆原理:
[ix]\vec{ca} \times F_a + \vec{cb} \times F_b =0[/ix]
至此,我们仅仅是用到了合力为零以及牛顿第三定律就证明了杠杆原理。